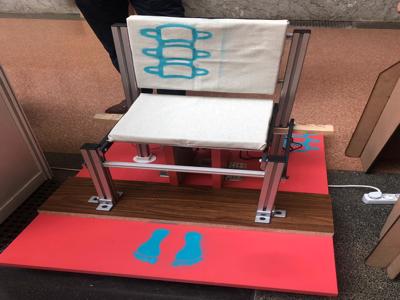
The standing frame is composed of a rod mechanism that integrates an articulated quadrilateral mechanism which forces the back of the chair to stay parallel to the supporter rods. It will be powered by a stepper motor that is coupled to the chair through a ball screw. Its movement will be controlled with arduino and electronics actioned by the user with a remote. The control system is helped by an encoder that measures the velocity of the ball screw and a “driver”. 220V of power supply are needed.
The mechanism is over a wheeled wooden platform that can be easily moved.
Approved by mentor
Medical tags
- Clinical need
- Rehabilitation
- Area
- Rehabilitation
- Technology
- Ergonomic support
- Project keywords
- Standing frame
- Device classification
- I