Voting
This voting section can help you to identify the best solutions for your medical device. Please use it for creating polls and discussion both on general (e.g. use of piezoelectric sensors) and/or on specific topics (e.g. use of LM7805 voltage regulator), in order to have a more clear idea of your concept, which will be described in the next "Concept description" section.
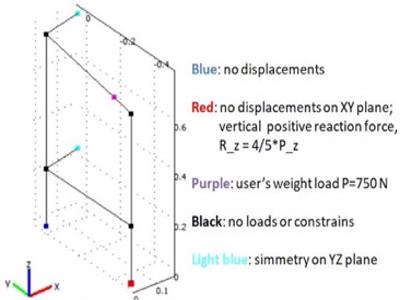
Configuration A
The four legs are orthogonal to the floor and handles are set at 1/5 of the relative tube length (from the rear extremity) to ensure stability;
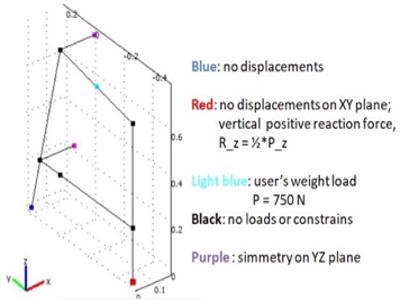
Configuration B
The configuration B, has forward legs with a 15˚ slope with respect to the normal to the floor, and the handles are set in the middle point of the relative tube. The slope of the upper oblique tube was the result of trigonometric considerations derived by imposing that the direction of user’s weight force has to cross the floor into the frame base to avoid overturning (angle of 10˚ between such tube and the normal to the legs).